Friction ( IF 6.3 ) Pub Date : 2025-6-3 , DOI: 10.26599/frict.2025.9441050
Baiyu Jiang , Xunjie Chen , Hao Wang , Jingang Yi
|
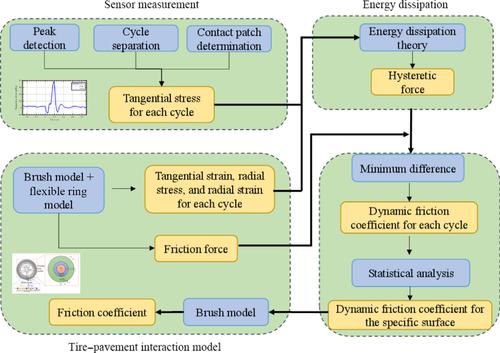
This study proposed an intelligent tire solution to predict tire-pavement friction from tire sensors using an integrated modeling-sensing approach. A laboratory platform is built to conduct dynamic tire tests under different operating parameters and surface conditions. Pressure-based sensors were embedded in the tire tread rubber to measure local forces on the tire contact patch. Physics-based models are built to interpret the friction generation mechanisms and predict the global friction force from sensor measurements. The tire−pavement interaction model consists of a Brush model for tire−pavement contact, a flexible ring model for tire stress and strain, and energy dissipation theory. The flexible ring model parameters are first calibrated with tire load−deflection curves. The feasible dynamic friction coefficients and the deformed tire profile were then solved using an interactive process among the three models using sensor measurements. Finally, the predicted friction forces were compared with the reference measurements from load cells to evaluate the prediction accuracy. The results confirmed the capability of smart tire sensing for estimating tire−pavement friction coefficients at various slip ratios under different surface conditions, which shows the potential for friction-informed vehicle control and safe driving.
中文翻译:
使用集成传感建模方法进行动态轮胎-路面摩擦预测
本研究提出了一种智能轮胎解决方案,使用集成的建模传感方法从轮胎传感器预测轮胎与路面的摩擦。构建了一个实验室平台,用于在不同作参数和表面条件下进行动态轮胎测试。基于压力的传感器嵌入轮胎胎面橡胶中,以测量轮胎接触面上的局部力。构建基于物理的模型来解释摩擦产生机制,并根据传感器测量预测全局摩擦力。轮胎-路面交互模型由轮胎-路面接触的 Brush 模型、轮胎应力和应变的柔性环模型以及能量耗散理论组成。首先使用轮胎载荷-挠度曲线校准柔性环模型参数。然后使用传感器测量在三个模型之间使用交互过程求解可行的动摩擦系数和变形的轮胎轮廓。最后,将预测的摩擦力与称重传感器的参考测量值进行比较,以评估预测精度。结果证实了智能轮胎传感在不同表面条件下估计不同滑移比下的轮胎-路面摩擦系数的能力,这表明了摩擦知情车辆控制和安全驾驶的潜力。

















































 京公网安备 11010802027423号
京公网安备 11010802027423号